Building on the learnings from last time, I'm working on improving the download experience. The previous experience was somewhat limited when trying to incorporate new sources. Unfortunately, this efficient downloading has also turned the vector database into something too big to keep in memory on my laptop, so I need to seek out other options for continued use.
Articles in the Breaking category
Back to Breaking: 3D Printing Edition - Part 2 Breaking

On the topic of broken parts, the 3D printed seat support that I'd made has also failed.
Back to Breaking: 3D Printing Edition Breaking

The second printed pedal finally broke. The two pieces still press fit together nicely, so it wasn't a catastrophic failure by any measure. I took some photos of the part after it happened with the intent to try and understand how it broke and how to make it stronger.
The Aftermath of Breaking a Pedal Breaking

The pedal for my bike broke without warning. Let's take a look
Undoing High Impulse Disassembly Breaking
Fixing a seat support that cracked (shattered?) in a crash
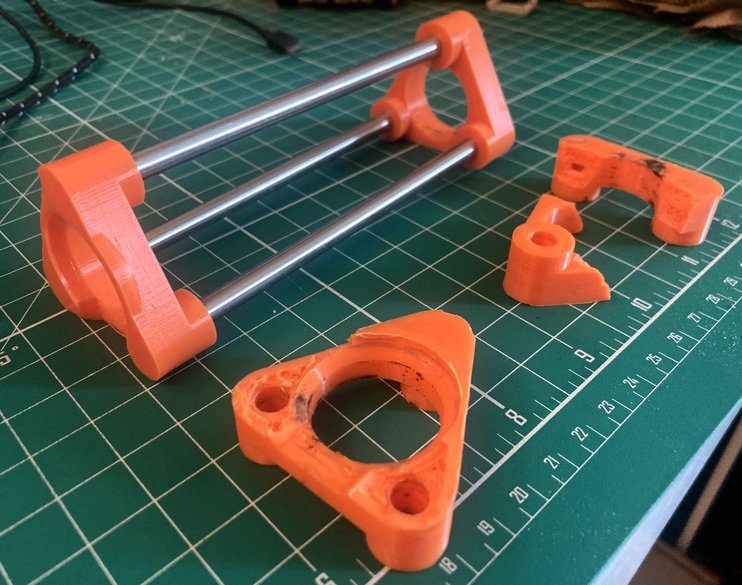
Restomod Day 21 Breaking

Today was mostly a breaking day. The printed half-shaft design melted itself apart after some high voltage testing for a couple of minutes, so it's going to need a redesign.
Restomod Day 14 Breaking

Photos from Day 14: A replacement half-shaft and a broken front upright
Restomod Day 8 Breaking
One aspect of reviving the XMods parts that I have involves figuring out what I need to fix to get the shorter chassis running again.
Restomod Day 7 Breaking
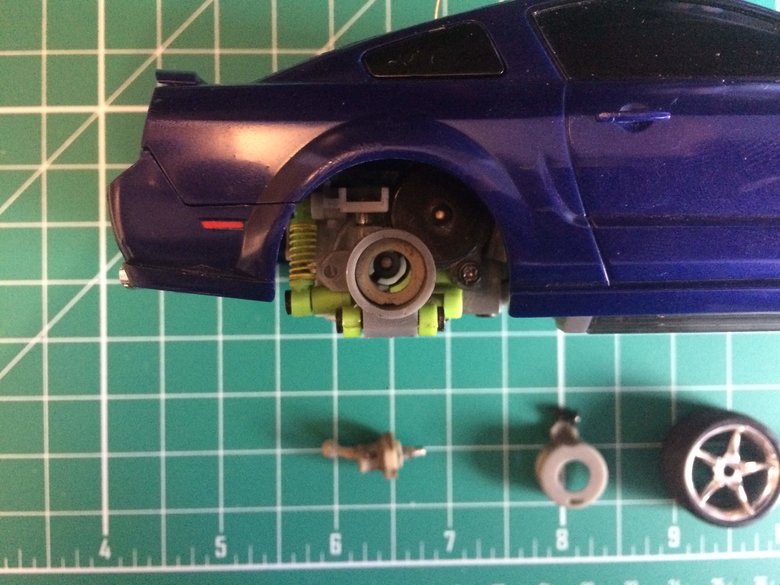
The wheel mounting design leads to some slop in the location of the wheels. In taking apart the mechanism, it appears that the slop comes from the plastic bushings not locating the driveshaft precisely.
Tearing Down a Quadcopter: Part 4 - Reading Upside Down Breaking
I decided to go for the full-break method of investigating the electronics, and while it worked out well to start, it's looking iffy going forward.
Tearing Down a Quadcopter: Part 3 - Reading a Circuit Board Breaking
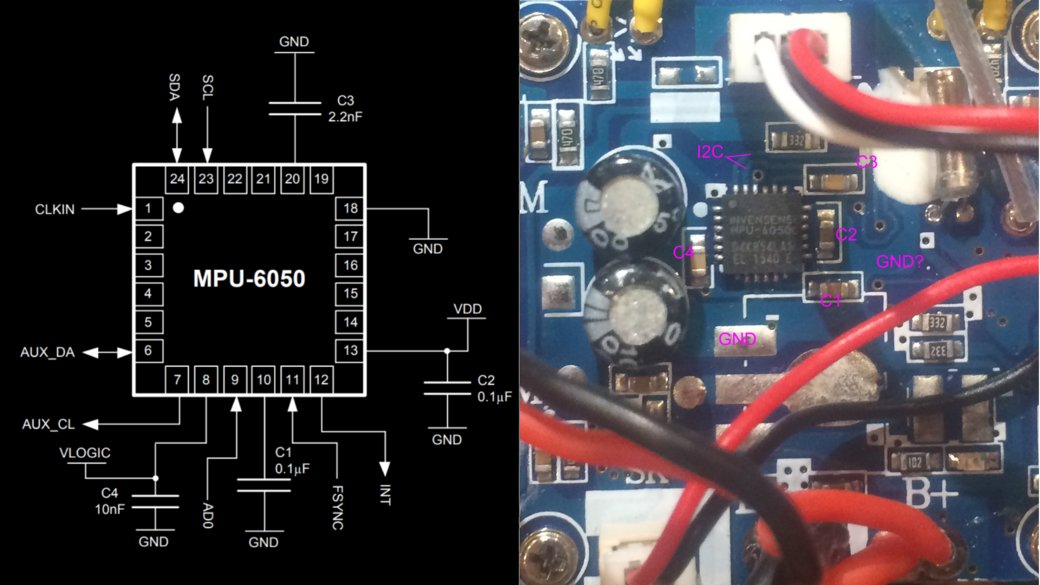
My background in electrical engineering involves the first 4 chapters of an electronics textbook I read on my phone when I had internet connection and power in town while hiking the Appalachian Trail. What can I figure out about how the circuit board works for the quadcopter?
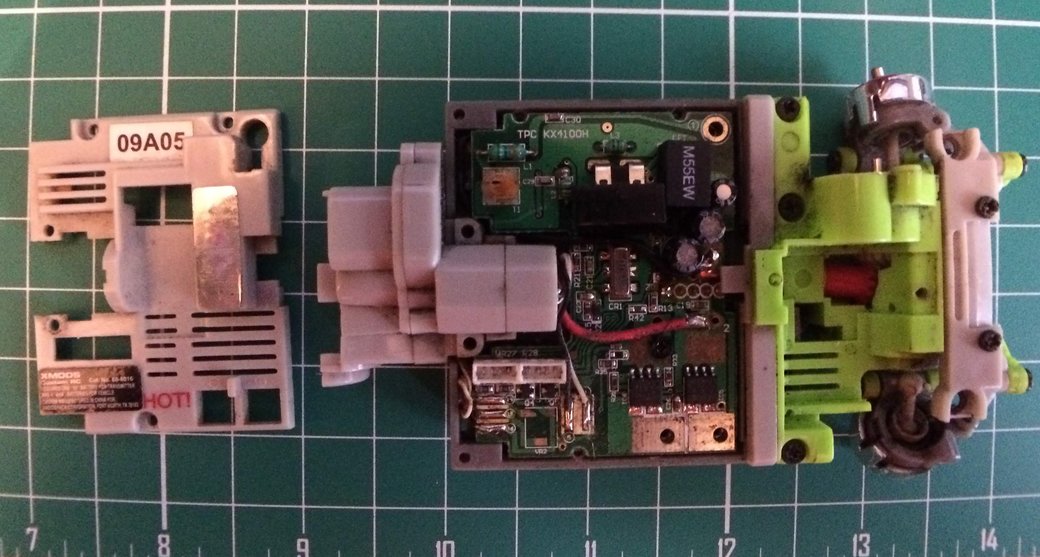
Tearing Down a Quadcopter: Part 2 - Power Systems Breaking
Mechanically, it's in shambles. What's left in the rubble? I dive into the electronics to figure it out.
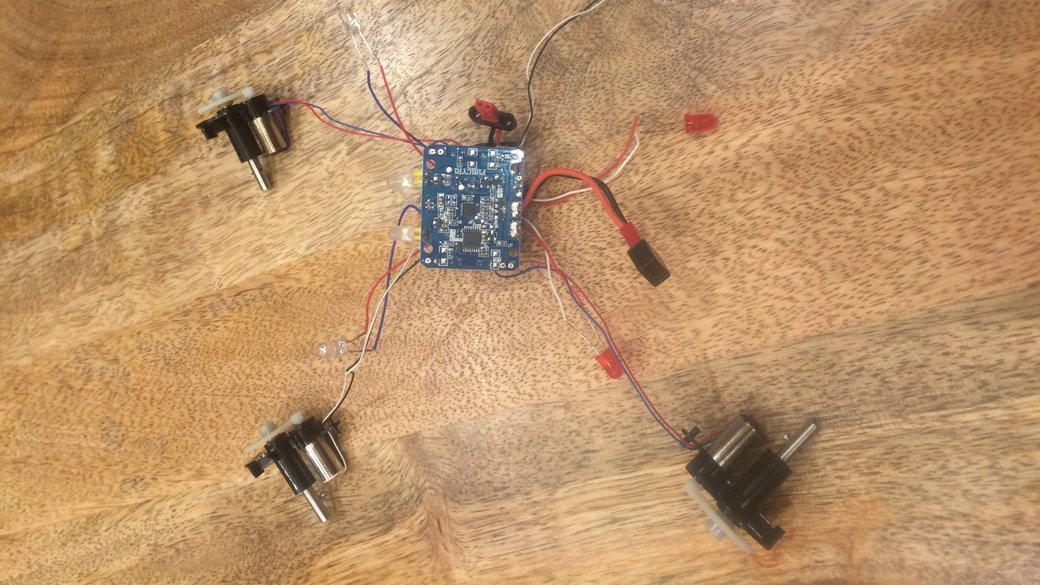
Tearing Down a Quadcopter: Part 1 Breaking
This has been a back burner project for a while; I'm now finally taking the time to take apart a quadcopter I've had for a while to see what goes into making it tick (and see if I can't mess with it a little bit too)
What's in a stepper? Breaking
For a lot of my life, the robots I worked with were pretty close to what CS wants from them: a stream of sensor data in, nicely organized in a common format across all sensors. To make things happen, I stream some outputs in another selection of formats. The sensor …